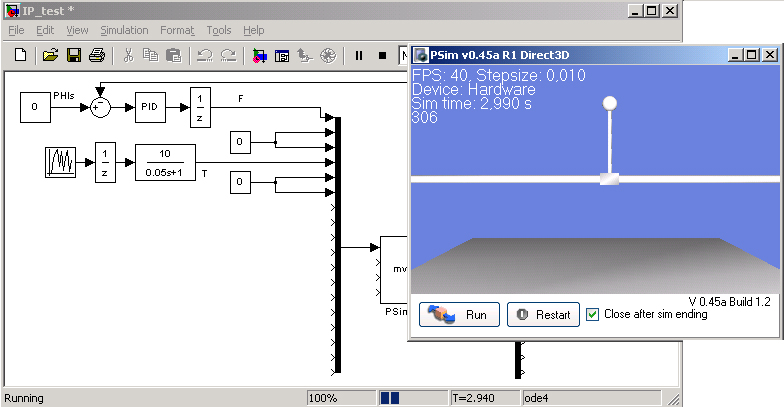
В качестве демонстрационной модели построим т.н."
Инверсный маятник" - один из
наиболее часто встречающихся примеров в Теории моделирования и
автоматического управления.
"
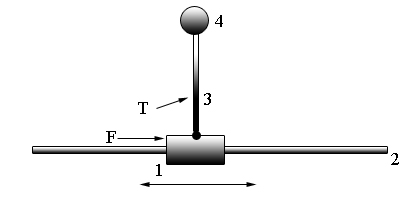
Инверсный
маятник" состоит из подвижной тележки
1, которая может двигаться
поступательно вдоль направляющей
2
(тележка имеет
1
поступательную степень свободы). Сверху на тележке расположен маятник,
состоящий из стержня
3 и груза
4.
Маятник прикреплен к тележке и имеет
1
вращательную степень свободы. В исходном положении маятник направлен
вверх (при этом считают угол отклонения маятника равен
0). На маятник действует случайный
возмущающий момент:
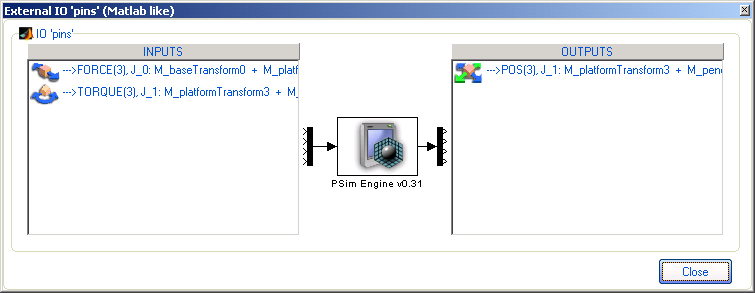
Задача системы
управления состоит в том, чтобы измеряя угол отклонения от вертикльной
оси и управляя тележкой (прикладывая к ней определенную силу)
поддерживать маятник в верхнем положении (угол отклонения
0).
1.
Создание VRML модели
Рассмотрим создание VRML
модели при помощи VRBuilder (входит
в состав Matlab совместно с VR Toolbox).
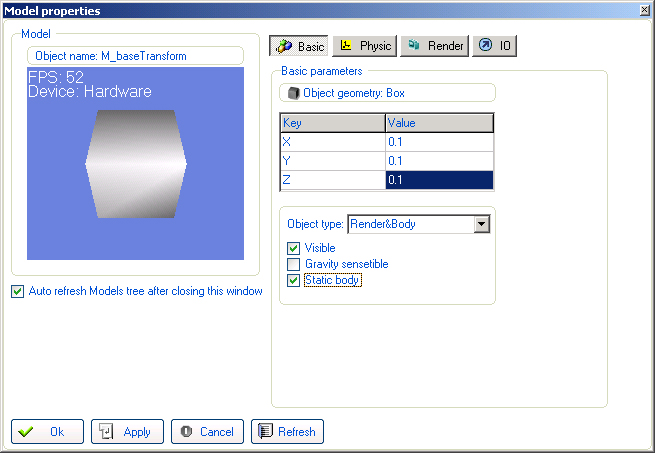
- Создаем основание модели BASE (оно будет неподвижно - Static body) - Box с размерами 0.1х0.1х0.1.

|
Рекомендация |
Из за
некоторых внутренних ошибок для текущей версии PSim Engine в качестве основания
рекомендуется применять модели на основе {geometry}:
Box
|
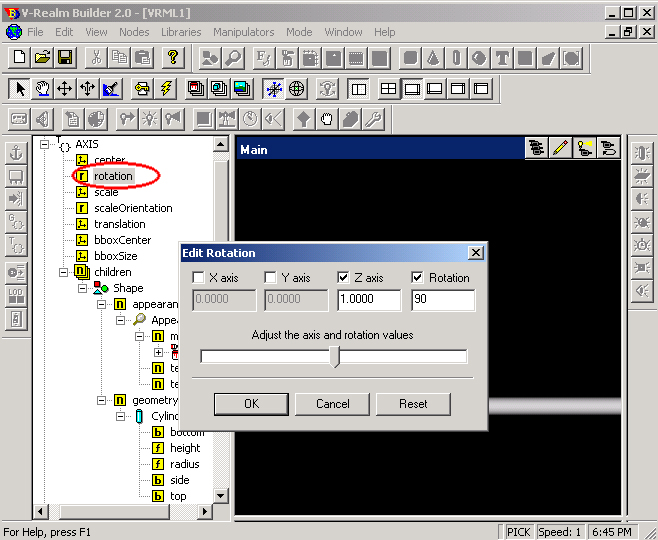
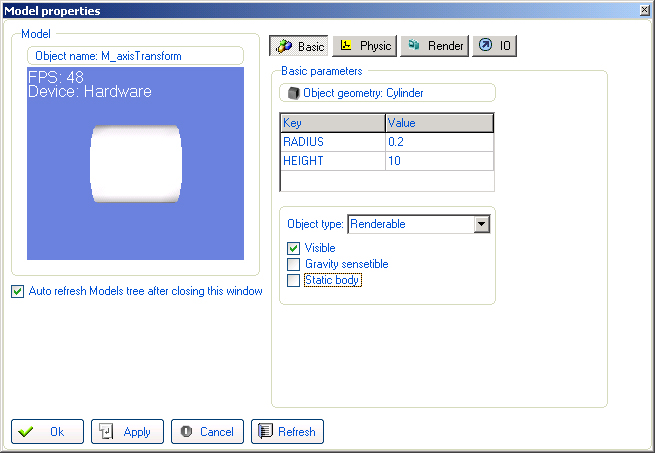
- Создаем направляющую AXIS - Cylinder с размерами: Radius - 0.2 Height - 10
- Поворачиваем
цилиндр вокруг оси Z на 900
- Создаем тележку PLATFORM - Box с размерами 1х0.6х0.6.
- Создаем стержень маятника PENDEL - Cylinder с размерами: Radius - 0.1, Height - 4.
- Передвигаем стержень маятника вдоль
оси Y на 4.
- Создаем груз маятника MASS - Sphere с размерами: Radius - 0.5.
- Передвигаем груз маятника вдоль оси Y на 4.
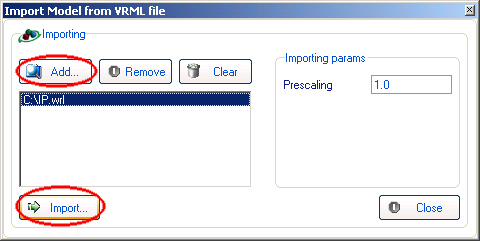
- Сохраняем полученную VRML модель (IP.wrl).
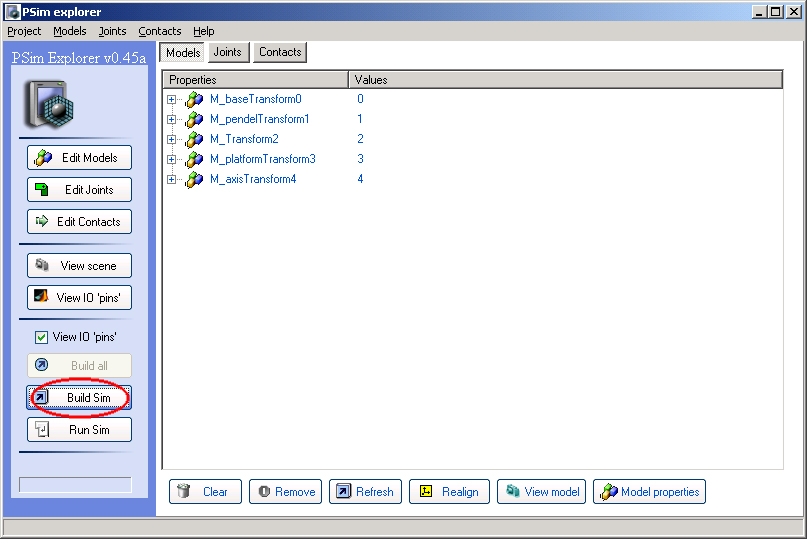
2.
Обработка модели в PSim Explorer
- Импортируем модели из VRML-файла:
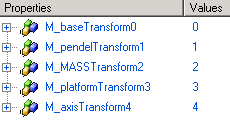
1. Основание является физическим телом и неподвижно:
2. Направляющая не является физическим телом, а только
визуализируется:
3. Тележка
является физическим телом, на нее действует сила тяжести масса тележки
-
1 кг.
4. Стержень маятника физическим телом, на него действует сила
тяжести масса стержня -
1 кг.
5. Груз маятника физическим телом, на него действует сила тяжести
масса стержня -
1 кг.
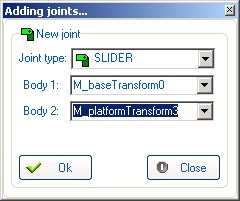
1.
Тележка имеет
1 поступательную
степень свободы - она может двигаться вдоль оси
X. Эта степень свободы моделируется
поступательным сочленением
SLIDER.
В сочленение объединяются модель тележки и неподвижное основание:
Параметры сочленения

|
Ось
сочленения - X
|
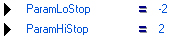
|
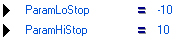
Верхняя и нижняя
граница изменения положения сочленения (так как одно из тел сочленения
неподвижно, то, фактически - пределы изменения положения тележки вдоль
оси поступательного движения)
|

|
Задавать
силу на сочленение (для SLIDER
она прикладывается вдоль оси сочленения).
|
2. Стержень маятника присоединяется к тележке при помощи
сочленения
HINGE:
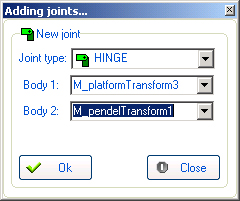
с параметрами:
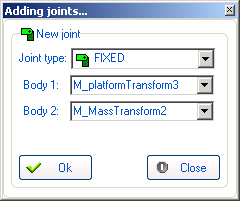
3. Груз маятника присоединяется к стержню при помощи
сочленения
FIXED (
не совсем корректно и
оптимально, но в простых системах допустимо):
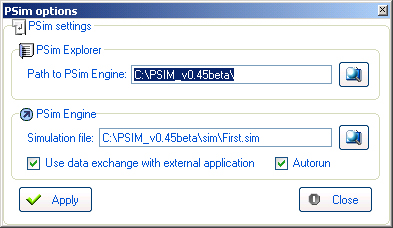
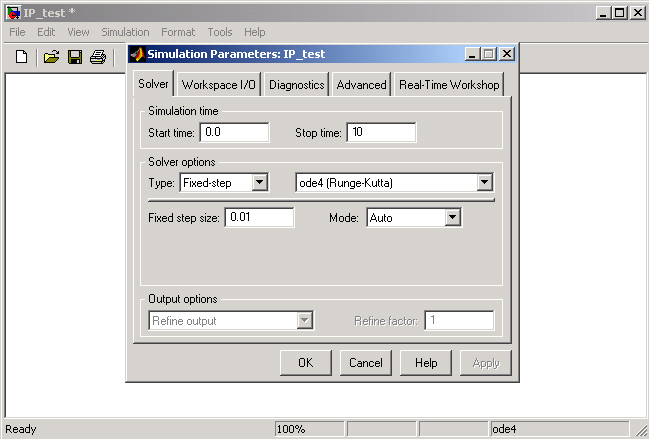
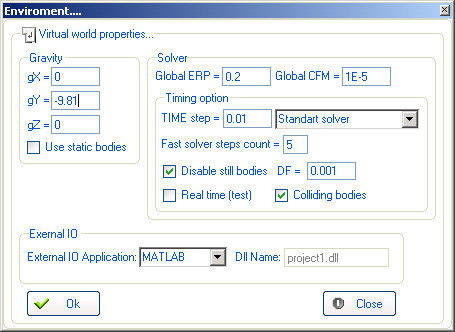
- Параметры среды моделирования
- Сборка и сохранение модели